
6.10.2020
The Multi-arm Installation Robot for Readying project (MIRROR), is being run by a GMV-led consortium. Its remit is to develop a multi-arm robot for orbiting space telescopes. It kicked off on 18 May, in a digital encounter, and on 24 July passed its first major checkpoint, the system requirements review (SRR).
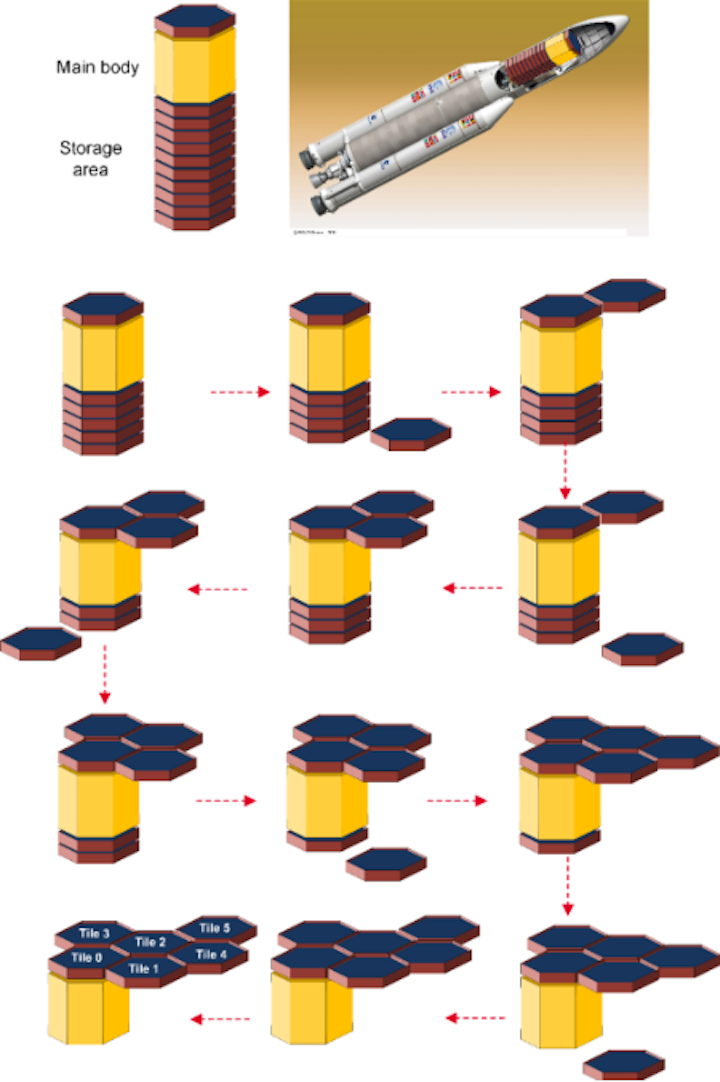
MIRROR's general aim is to come up with technological solutions for such aspects as structure, system kinematics, data- and electrical-architecture, sensors, control implementation, operations and Fault Detection, Isolation, and Recovery (FDIR). The resulting robotic system will thus be able to manipulate, transport and assemble segments or modules, for the task of repairing and updating orbiting satellites performing a wide range of operational missions.
Within this project GMV has taken on responsibility for establishing the manufacturing-, assembly-, integration- and testing-requirements, as well as developing the project-vetting test bed.
MIRROR takes in the design of a multi-arm robot prototype for system validation in a laboratory environment, plus a multi-arm robot for the flight system.
The preliminary design and modeling review is due to be held next November, consolidating MIRROR's requirements and ushering in the implementation and design phase.
Quelle: gmv