
18.12.2022
Much like how familiar landmarks can give travelers a sense of direction when their smart phones lose their lock on GPS signals, a NASA engineer is teaching a machine to use features on the Moon’s horizon to navigate across the lunar surface.
“For safety and science geotagging, it’s important for explorers to know exactly where they are as they explore the lunar landscape,” said Alvin Yew, a research engineer at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “Equipping an onboard device with a local map would support any mission, whether robotic or human.”
NASA is currently working with industry and other international agencies to develop a communications and navigation architecture for the Moon. LunaNet will bring “internet-like” capabilities to the Moon, including location services.
However, explorers in some regions on the lunar surface may require overlapping solutions derived from multiple sources to assure safety should communication signals not be available.
“It’s critical to have dependable backup systems when we’re talking about human exploration,” Yew said. “The motivation for me was to enable lunar crater exploration, where the entire horizon would be the crater rim.”
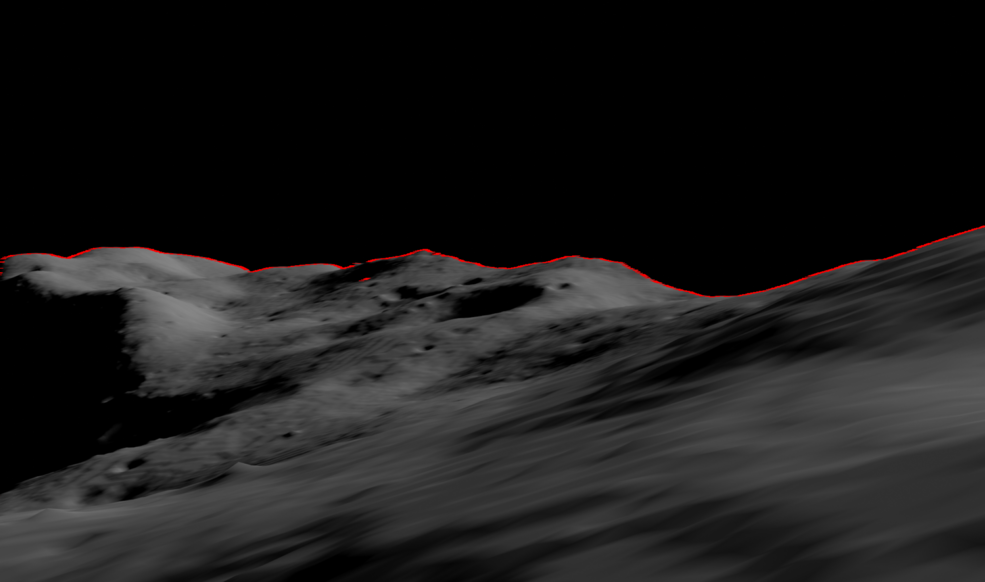
Yew started with data from NASA’s Lunar Reconnaissance Orbiter, specifically the Lunar Orbiter Laser Altimeter (LOLA). LOLA measures slopes, lunar surface roughness, and generates high resolution topographic maps of the Moon. Yew is training an artificial intelligence to recreate features on the lunar horizon as they would appear to an explorer on the lunar surface using LOLA’s digital elevation models. Those digital panoramas can be used to correlate known boulders and ridges with those visible in pictures taken by a rover or astronaut, providing accurate location identification for any given region.
“Conceptually, it’s like going outside and trying to figure out where you are by surveying the horizon and surrounding landmarks,” Yew said. “While a ballpark location estimate might be easy for a person, we want to demonstrate accuracy on the ground down to less than 30 feet (9 meters). This accuracy opens the door to a broad range of mission concepts for future exploration.”
Making efficient use of LOLA data, a handheld device could be programmed with a local subset of terrain and elevation data to conserve memory. According to work published by Goddard researcher Erwan Mazarico, a lunar explorer can see at most up to about 180 miles (300 kilometers) from any unobstructed location on the Moon. Even on Earth, Yew’s location technology could help explorers in terrain where GPS signals are obstructed or subject to interference.
Yew’s geolocation system will leverage the capabilities of GIANT (Goddard Image Analysis and Navigation Tool). This optical navigation tool developed primarily by Goddard engineer Andrew Liounis previously double-checked and verified navigation data for NASA’s OSIRIS-REx mission to collect a sample from asteroid Bennu (see CuttingEdge, Summer 2021).
In contrast to radar or laser-ranging tools that pulse radio signals and light at a target to analyze the returning signals, GIANT quickly and accurately analyzes images to measure the distance to and between visible landmarks. The portable version is cGIANT, a derivative library to Goddard’s autonomous Navigation Guidance and Control system (autoGNC) which provides mission autonomy solutions for all stages of spacecraft and rover operations.
Combining AI interpretations of visual panoramas against a known model of a moon or planet’s terrain could provide a powerful navigation tool for future explorers.
Quelle: NASA