
17.09.2019
Navigation Images from the target marker
separation operation (TM-ORB) (Real time delivery)
We are currently delivering navigation images with the Optical Navigation Camera - Telescopic (ONC-T) in real time.
Please understand that the image may be distorted due to the network status or data processing.
- Images wil be delibered on September 16. Part of the images at September 12-15 are listed at the bottom of this page.
- In this operation, unlike the previous descent operation using a wide-angle camera, navigation images are acquired using both the narrow angle camera ONC-T and the wide-angle camera ONC-W1. This time, ONC-T images will be mainly delivered.
- Interval of the images is scheduled about 40 minutes. It may be shifted due to the operation.
- The page displays the latest list of images at the time of loading. Please reload the browser window to update to the latest image.
- Time is given in UTC (Universal Time). For Japan time (JST), please add 9 hours. For Eastern Time (ET), please subtract four hours.
- Delivery will be finished before the lowest point. To know the operation information, please see Twitter (below).

+++
Target marker separation operation
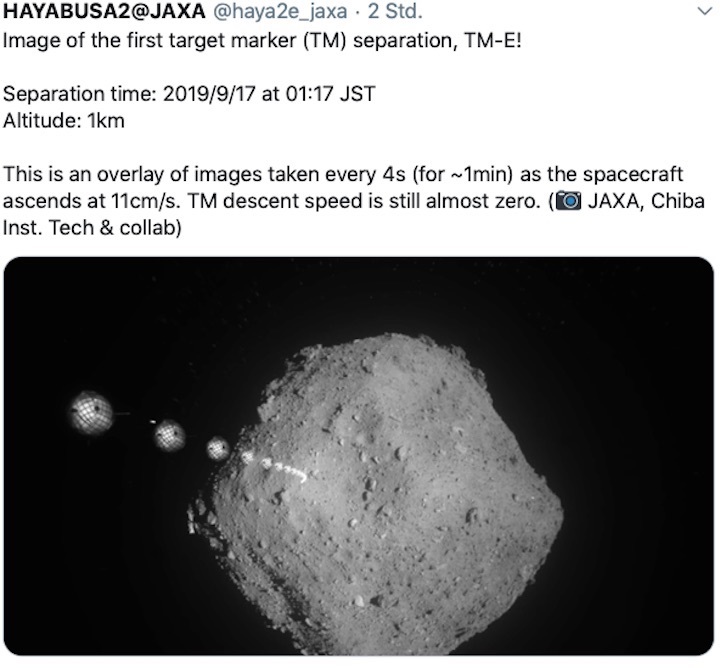
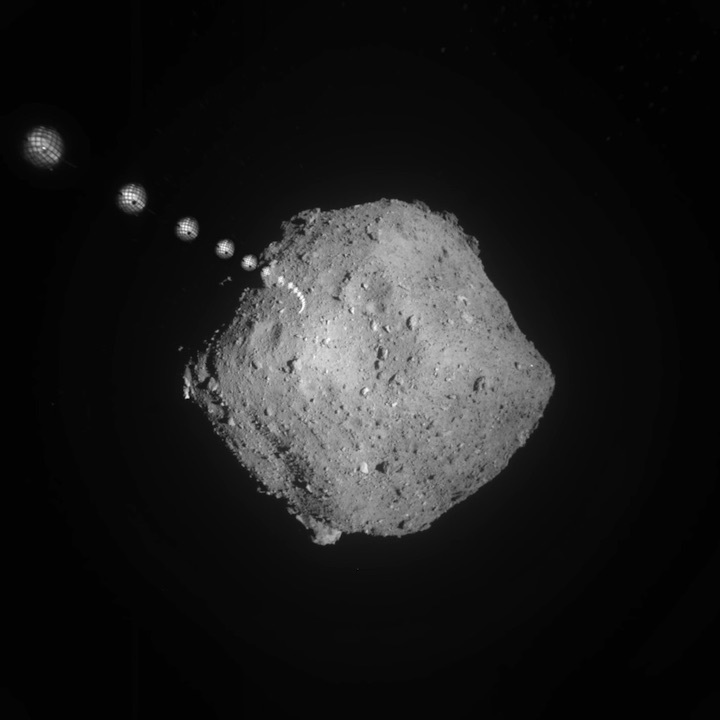
Image of the first target marker (TM) separation, TM-E!
Separation time: 2019/9/17 at 01:17 JST
Altitude: 1km
This is an overlay of images taken every 4s (for ~1min) as the spacecraft ascends at 11cm/s. TM descent speed is still almost zero. (JAXA, Chiba Inst. Tech & collab)
Quelle: Twitter, JAXA
+++
From September 12 to September 17, the ‘Target marker separation operation’ will be performed. After that, the ‘Target marker orbit observation operation’ will continue. This is an operation to observe the target marker that goes around Ryugu, and it will be done until the target marker is landed (until about September 23). This operation was rescheduled from September 5 as announced in another article.
These ‘Target marker separation operation’ and ‘Target marker orbit observation operation’ are rehearsals for the separation operation of MINERVA-II2 Rover-2 (University consortium development) scheduled for October.
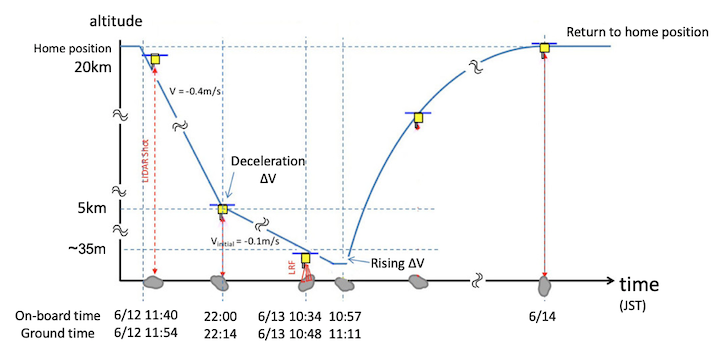
Figure 1 shows an overview of the operation. The descent starts at a low speed from September 12, and the TM is separated at a surface altitude of 1km from around 0:00 to 2:00 (JST) on September 17. A total of two TMs will be separated. They will be put into the equator and polar orbits around Ryugu, respectively. After that, the spacecraft moves to a position 20km away from Ryugu, with the sun behind. From that position, the optical camera continuously observes the TM trajectory descending around Ryugu. With the sun on the back, the retroreflective film covering the surface of the TMs shines brightly and can be observed. They will be observed until around September 23.
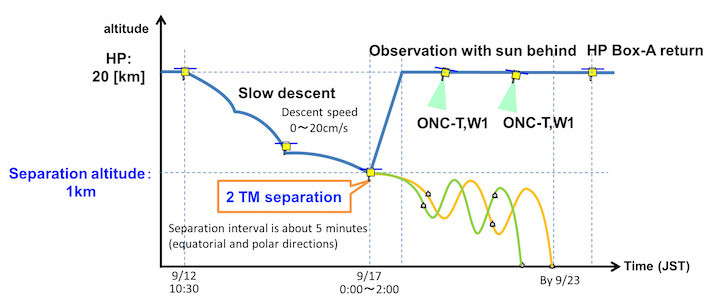
- Figure 1 Overview of the target marker separation operation and orbit observation operation
(Image credit: JAXA)
Figure 2 shows the mounting position of the targer markers. B and A are already separated from the five target markers. This time, E and C will be separated.
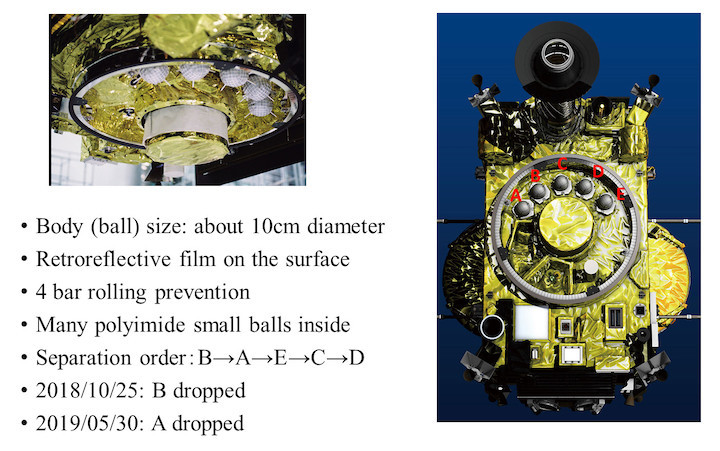
Quelle: JAXA
----
Update: 18.09.2019
.
Hayabusa 2 completes practice run for deployment of last asteroid lander
Japan’s Hayabusa 2 spacecraft deployed two target markers Monday above asteroid Ryugu in a rehearsal for the release of the mission’s final landing robot next month.
The robotic asteroid explorer released the two 4-inch (10-centimeter) ball-shaped markers seven minutes apart Monday, after the Hayabusa 2 spacecraft descended to a distance of about 3,300 feet (1 kilometer) from Ryugu.
The Japan Aerospace Exploration Agency, or JAXA, released a pair of images showing the target markers, each covered in a reflective film, after their release from Hayabusa 2. The target markers are unpowered and entirely passive objects designed as navigation aids for Hayabusa 2 around the asteroid.
With both target markers away, Hayabusa 2 fired its thrusters to begin an ascent back to a home position farther from the asteroid. Ground teams are in the final stages of planning another descent toward Ryugu in October, during which Hayabusa 2 will deploy the last of four landing robots to the asteroid’s surface.
“We released two target markers from an altitude of about 1 kilometer, and these images were just released,” said Makoto Yoshikawa, Hayabusa 2’s mission manager at JAXA. “The purpose of this release is a rehearsal of the release of the MINERVA-II-2 small rover next month.”
Hayabusa 2’s cameras will track the movement of the two navigation aids as they fly in space around Ryugu over the next several days. Scientists expect Ryugu’s tenuous gravity will pull the target markers to the asteroid’s surface within a week.
“We can observe the target marker’s orbit around Ryugu and we can then determine the gravity field of Ryugu in detail, so this is a new operation,” Yoshikawa said Tuesday in a press briefing at the European Planetary Science Congress.
Hayabusa 2 is in the final phase of its science campaign at asteroid Ryugu, where it arrived in June 2018 after a three-and-a-half year journey from Earth. The spacecraft has conducted two touch-and-go landings on Ryugu — one in February and another in July — to gather pristine asteroid samples for return to Earth.
Last year, Hayabusa 2 deployed three mobile landers to hop around Ryugu. Two MINERVA-II landers, developed in Japan, and a larger robot named MASCOT managed by the German and French space agencies beamed back images and scientific data from Ryugu’s surface.
One more lander remains in Hayabusa 2’s toolkit.
The MINERVA-II-2 mobile lander was developed by a consortium of Japanese universities as a piggyback payload for Hayabusa 2. The robot is smaller than a soccer ball, but carries mechanisms to allow it to move around the asteroid, along with a camera, a thermometer, photodiode, and an accelerometer.
Hayabusa 2 is scheduled to depart Ryugu by the end of this year using plasma engines, aiming for a return to Earth in December 2020, when the craft will release a parachute-equipped re-entry capsule to land in Australia.
Scientists will retrieve the asteroid specimens for detailed analysis.
“If we have 0.1 grams (of material), we can do all the sample analysis, but we hope we will have much more,” Yoshikawa said.
“We want to study the organic matter on Ryugu because we want to know the origin of life on the Earth, and we think Ryugu has original matter that became life,” he said. “So our main purpose is analysis of the organic matter on the surface of Ryugu.”
Quelle: SN
----
Update: 2.10.2019 /20.00 MESZ
.

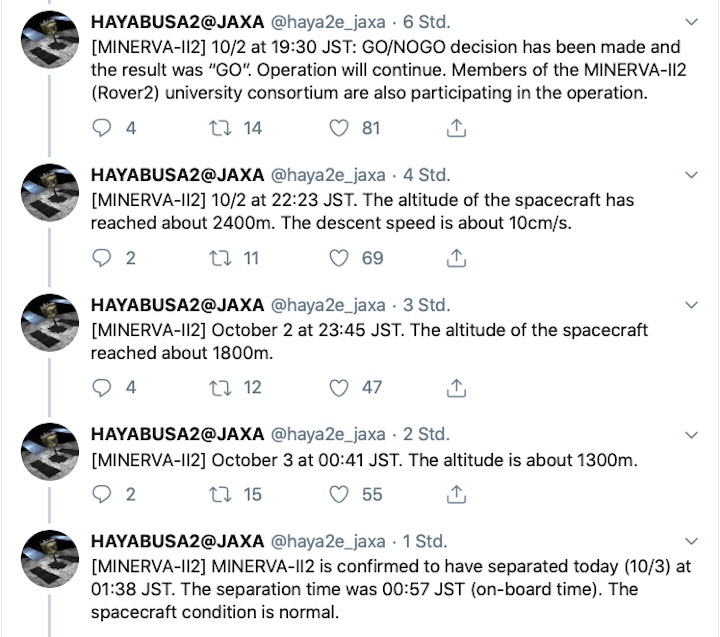
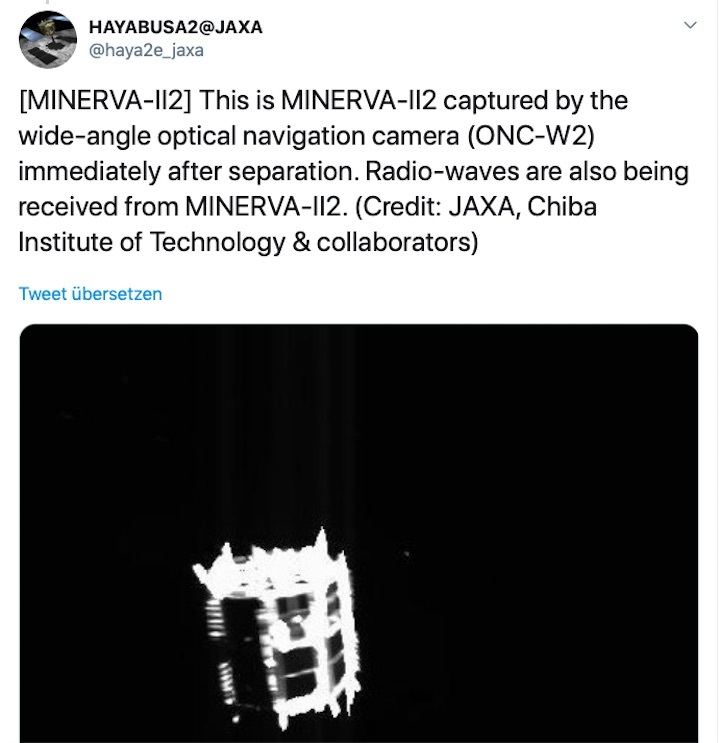

Quelle: JAXA
----
Update: 31.10.2019
.
Hayabusa2 completes key missions
The Hayabusa2 unmanned spacecraft has completed all its major observation missions for the asteroid Ryugu, according to the Japan Aerospace Exploration Agency (JAXA).
The Minerva-II 2 robotic explorer released on Oct. 3 from Hayabusa2 successfully orbited the asteroid and landed on it the following day, JAXA said Monday.
After the mission, Hayabusa2 is set to leave Ryugu in November or December to return to Earth.
“We’ve succeeded in high-precision gravity measurements,” JAXA researcher Kento Yoshikawa told a news conference, adding that Hayabusa2 researched the asteroid to the maximum extent possible.
JAXA originally planned to use the Minerva-II 2 explorer, developed by Tohoku University and others, to test its hopping rover on the asteroid surface and conduct observations.
But problems were found with the control system, leading JAXA to switch to a plan to closely research the gravitational field of the asteroid.
For the research, the Minerva-II 2 explorer was released at an altitude of 1,000 meters, and its travel path was tracked. JAXA obtained enough data to estimate the gravitational field, the agency said.
Hayabusa2 was launched on an H-2A rocket in December 2014.
It spent 3½ years to reach the asteroid 300 million kilometers away from Earth.
The spacecraft landed on Ryugu twice and collected samples. It succeeded in creating an artificial crater on the asteroid, the first such achievement ever.
Hayabusa2 is slated to return to Earth around the end of 2020 with the samples collected from the asteroid.Speech
Quelle: The Japan News
----
Update: 12.11.2019
.
Hayabusa 2 to bid sayonara to Ryugu, start long trip back to Earth
The Hayabusa 2 space probe on Nov. 13 will start its 700-million-kilometer journey back to Earth, carrying unprecedented samples believed collected from the asteroid Ryugu, education minister Koichi Hagiuda said.
The return trip will take about a year, Hagiuda said at a news conference on Nov. 12.
Hayabusa 2, currently located about 20 km above the asteroid, will use its ion engine to move away from Ryugu and put it on a trajectory toward the sun, according to the plan of the Japan Aerospace Exploration Agency (JAXA).
The probe will make a three-fourths orbit around the sun, and the star’s gravity will fling the probe toward Earth.
By the end of 2020, Hayabusa 2 will be above Australia where it will release a capsule containing sand and rock samples from the asteroid, according to JAXA’s plan.
But the probe’s work will not end there. It is expected to immediately travel to another small asteroid.
Hayabusa 2 reached Ryugu in June 2018 and landed twice on the asteroid this year.
It dropped an explosive device on Ryugu, creating an artificial crater on the surface. The probe later fired a bullet around the crater, whipping up the sediments unearthed by the explosion.
The floating samples collected by the probe are believed to be the first underground ones taken from an asteroid.
In October, the probe dropped a small robot on the asteroid to end its Ryugu mission.
Quelle: The Asahi Shimbun
----
Update: 13.11.2019
.
Japan spacecraft starts yearlong journey home from asteroid
Japan's Hayabusa2 spacecraft has departed from a distant asteroid, starting its yearlong journey home after successfully completing its mission to bring back soil samples and data that could provide clues to the origins of the solar system

This image released on Wednesday, Nov. 13, 2019, by the Japan Aerospace Exploration Agency (JAXA), shows asteroid Ryugu taken by Japan’s Hayabusa2 spacecraft. The Japan spacecraft has departed from the distant asteroid, starting its yearlong journey home after successfully completing its mission to bring back soil samples and data that could provide clues to the origins of the solar system.JAXA
Japan's Hayabusa2 spacecraft departed from a distant asteroid on Wednesday, starting its yearlong journey home after successfully completing its mission to bring back soil samples and data that could provide clues to the origins of the solar system, the country's space agency said.
The Japan Aerospace Exploration Agency said the spacecraft left its orbit around the asteroid Ryugu, about 300 million kilometers (180 million miles) from Earth.
Hayabusa2 on Wednesday captured and transmitted to Earth one of its final images of Ryugu, or "Dragon Palace," named after a sea-bottom castle in a Japanese folk tale, as it slowly began moving away from its temporary home, JAXA said. Hayabusa2 will continue its "farewell filming" of the asteroid for a few more days.
Then Hayabusa2 will adjust its position on around Nov. 18 after retreating 65 kilometers (40 miles) from the asteroid and out of its the gravitational pull. It will then receive a signal from JAXA to ignite a main engine in early December en route to the Earth's vicinity.
Hayabusa2 made touchdowns on the asteroid twice, despite difficulties caused by Ryugu's extremely rocky surface, and successfully collected data and samples during its 1½-year mission since arriving there in June 2018.
In the first touchdown in February, it collected surface dust samples. In July, it collected underground samples for the first time in space history after landing in a crater it had earlier created by blasting the asteroid surface.
Hayabusa2 is expected to return to Earth in late 2020 and drop a capsule containing the precious samples in the Australian desert.
It took the spacecraft 3½ years to arrive at the asteroid, but the journey home is much shorter thanks to the current locations of Ryugu and Earth.
JAXA scientists believe the underground samples contain valuable data unaffected by space radiation and other environmental factors that could tell more about the origin of the solar system 4.6 billion years ago.
Asteroids, which orbit the sun but are much smaller than planets, are among the oldest objects in the solar system and may help explain how Earth evolved. Hayabusa2 scientists also said they believe the samples contain carbon and organic matter and hope they could explain how they are related to Earth.
Quelle: abcNews
----
Update: 14.11.2019
.
Hayabusa 2 begins long journey home carrying Ryugu asteroid samples

It’s time to come home. Japan’s Hayabusa 2 spacecraft has begun its departure from the asteroid Ryugu, carrying two samples of the space rock back to Earth for analysis. “This is an emotional moment!” the team posted on the mission’s Twitter account.
The probe will take about five days to exit the sphere of Ryugu’s gravitational influence. During this time, it will make “farewell observations” as it slowly moves away from the small world that has been its home for the past 17 months. Then it will fire its main engines for the journey back to Earth, which will take about a year.
The original Hayabusa mission returned the first asteroid samples to Earth in 2010. This time, the probe has sampled the interior of and asteroid, first by firing a tantalum bullet into the rock, then dropping an explosive charge that disturbed an area about 20-metres wide on its surface.
Ryugu is a relic from the formation of our solar system. Its surface has been altered by millions or billions of years of exposure to cosmic radiation, but its pristine interior could tell us about the make-up of the early planets.
The mission will also act as a demonstration for the nascent space mining industry. The ability to obtain resources such as water, iron and silicon on asteroids may be essential for humanity to make a home on other worlds.
Another asteroid explorer is following close behind. NASA’s OSIRIS-Rex spacecraft is currently in orbit around the asteroid Bennu and is set to grab its first sample in the middle of 2020.
Quelle: NewScientist
----
Update: 29.11.2019
.
Impact crater data analysis of Ryugu asteroid illuminates complicated geological history
Analysis of the impact craters on Ryugu using the spacecraft Hayabusa 2’s remote sensing image data has illuminated the geological history of the Near-Earth asteroid.
A research group led by Assistant Professor Naoyuki Hirata of the Department of Planetology at Kobe University’s Graduate School of Science revealed 77 craters on Ryugu. Through analyzing the location patterns and characteristics of the craters, they determined that the asteroid’s eastern and western hemispheres were formed at different periods of time.
It is hoped that the collected data can be used as a basis for future asteroid research and analysis.
These results were first published in the American Scientific Journal ‘Icarus’ on November 5 2019.
Introduction
The Japan Space Agency (JAXA)’s Hayabusa 2 has been used to carry out various missions to increase our understanding of the spinning top-shaped, Near-Earth asteroid Ryugu. Since arriving in June 2018, the unmanned spacecraft has taken samples and a great number of images of the asteroid. It is hoped that these can reveal more about Ryugu’s formation and history.
This research group focused on using the image data to determine the number and location of impact craters on the asteroid. Impact craters are formed when a smaller asteroid or a comet hits the surface of the asteroid. Analyzing the spatial distribution and the number of impact craters can reveal the frequency of collisions and aid researchers in determining the age of different surface areas.
Research Methodology
First of all, the image data from Hayabusa 2 was analyzed. Hayabusa 2 has many different types of camera including Optical Navigation Cameras (ONC). The ONC team has been able to take around 5000 images of Ryugu, which have revealed many surface features- including impact craters. For this study, image data obtained from the ‘ONC-T’ camera between July 2018 and February 2019 was utilized. The research group had to determine which of these images showed craters. 340 images were used for crater counting, with stereopair images making it easier to identify the craters. A global image mosaic map was constructed from the ONC images and rendered onto the computer model of Ryugu’s shape. Small Body Mapping Tool software was then used to measure the size, latitude and longitude of the craters. A LiDAR (Light Detection and Ranging pulsed laser) was also utilized to determine the overall size of Ryugu.
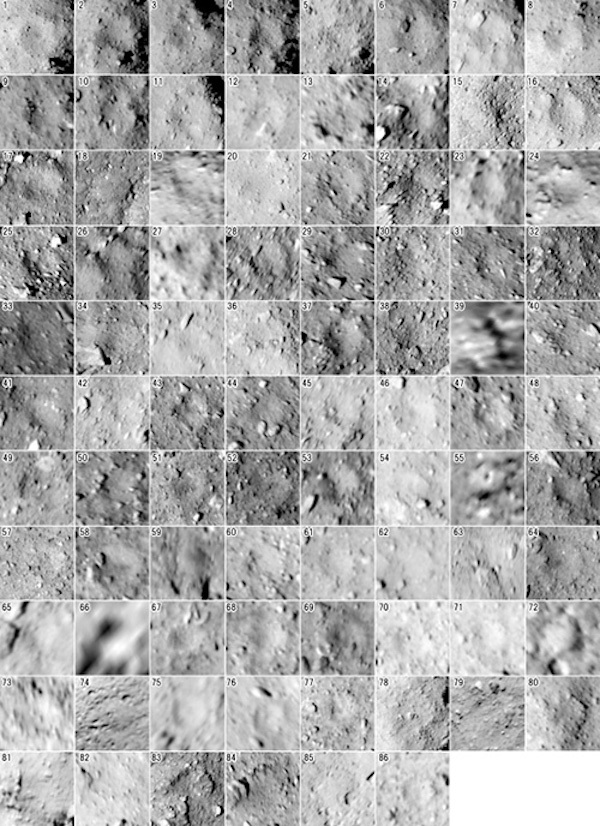
The depressions identified on Ryugu were divided into four categories- depending on how evident their circular appearance was. Category I to III depressions were classified as distinct craters. Category IV depressions only had quasi-circular features, therefore it was hard to determine whether they were craters or not. Many craters were filled with boulders or lacked a distinct shape. Depressions that were too vague to determine were left out of the results.
Research Results:
The research team were able to identify all impact craters over 10 to 20m in diameter on Ryugu’s entire surface- a total of 77 craters. Furthermore, a pattern was discovered in their distribution. The section of the eastern hemisphere near the meridian was found to have the most craters. This is the area near the large crater named Cendrillon - which is one of Ryugu’s biggest. In contrast, there are hardly any craters in the western hemisphere- suggesting that this part of the asteroid was formed later. The analysis also revealed that there are more craters at lower latitudes than at higher latitudes on Ryugu. In other words, there are very few craters in Ryugu’s polar regions.
The equatorial ridge in the eastern hemisphere was determined to be a fossil structure. When asteroids like Ryugu rotate at high speeds, this can alter their shape. It is thought that this ridge formed in the distant past during a period when it only took Ryugu 3 hours to rotate. As the eastern hemisphere and western hemisphere were formed at different periods of the asteroid’s history- this suggests that there have been at least two instances where Ryugu’s rotational speed has increased.
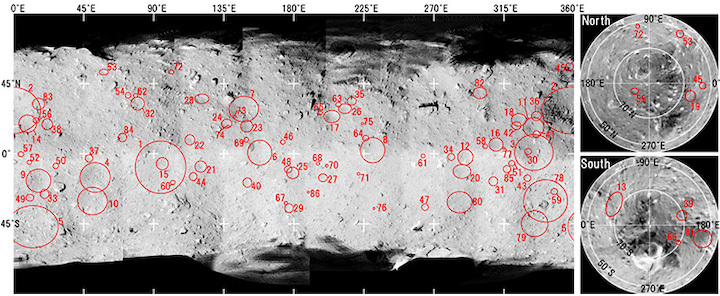
Figure 1: Size and location of craters on Ryugu (Figure from the Journal paper): The craters are numbered in order of size.
Further Research
The results of this study were compiled into a global impact crater catalogue for Ryugu. It is hoped that this database can be used as a basis for future research and that comparing these results with those of a similar asteroid will lead to greater understanding about these astronomical objects.
Hayabusa2 is scheduled to drop the capsule containing samples of Ryugu’s surface into Earth’s atmosphere in late 2020. Analysis of these samples should provide further insight into the asteroid and how it was formed.
Glossary:
- Stereopair images:
images of the same object but from a different angle. Viewing the images in a stereopair with each eye can make the image appear 3D- giving a sense of depth.
Quelle: KOBE UNIVERSITY
----
Update: 4.12.2019
.
Hayabusa2 now on return journey to Earth

Japan's space agency says its asteroid explorer Hayabusa2 is on its way back to Earth after confirming its main engines are working properly.
The probe reached the asteroid Ryugu June last year and spent about one and a half years exploring its surface before leaving on November 13.
Tests were then performed on its four main ion engines over a two-week period.
The Japan Aerospace Exploration Agency, or JAXA, announced that the engines were ready before sending the probe on a return journey on Tuesday at 11a.m., Japan time.
JAXA says the probe is more than 250 million kilometers from Earth and is scheduled to arrive home around November or December next year.
The agency plans to let the probe release a re-entry capsule, expected to contain rock samples, that will land in an Australian desert.
The samples will be provided mainly to scientists in Japan, who will begin examining them in the summer of 2021.
Quelle: NHK News
----
Update: 28.12.2019
.
Farewell, Ryugu!

After arriving at asteroid Ryugu on June 27 of last year (2018), Hayabusa2 spent all its time exploring the small celestial body. Then on November 13, 2019 at 10:05 JST (onboard time), the spacecraft left Ryugu to return home. In total, Hayabusa2 had stayed at Ryugu for 504 days.
From November 13 to 19, the “Ryugu Farewell Observation” was performed. On November 19, the attitude of the spacecraft was changed to that needed for the ion engine injection, making it no longer possible to photograph Ryugu.
This image (Figure 1) was captured with the ONC-T (Optical Navigation Camera – Telescopic) during the “Ryugu Farewell Observation” and was posted on our twitter feed on November 21.
[Open in another window]
Figure 1: Animation created from navigation images captured during the departure from Ryugu from November 13, 2019 until the disappearance of Ryugu due to attitude control on November 19, 2019. This image was previously released on November 21. Image frames are not continuous in time. (Image credit※: JAXA, Chiba Institute of Technology, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, University of Aizu, AIST).
When Figure 1 was released, only a subset of our final images of Ryugu had been downloaded to Earth. Later we acquired all the images from the spacecraft. Figure 2 shows the full version of this animation, with images captured by ONC-T and ONC-W1 (Optical Navigation Camera – Wide angle).

- [Open in another window]
Figure 2: Animation created from a continuous set of navigation images captured during the departure from Ryugu from November 13, 2019 until the disappearance of Ryugu due to attitude control on November 19, 2019. ONC-T images are on the left and those from ONC-W1 are on the right. (Image credit※: JAXA, Chiba Institute of Technology, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, University of Aizu, AIST).
In Figure 2, the position of Ryugu occasionally shifts suddenly due to the spacecraft changing its attitude. This attitude adjustment was done so that Ryugu does not leave the camera’s field of view. Then on November 19, Ryugu did move out of the camera’s field of view due to the necessary attitude control for ion engine operations.
After watching for nearly one year and five months, it feels lonely now that Ryugu has disappeared. But our departure was needed for the last important task: the return to Earth.
+++
Ryugu rotation movie
A selection of the images captured by the Optical Navigation Cameras (ONC) have been released on the open space science data archive, DARTS (Data ARchives and Transmission System). The DARTS archive is maintained by the Center for Science-satellite Operation and Data Archive (C-SODA) at ISAS, JAXA. Using this publicly available data, we have created a movie.
Figure 1 shows Ryugu’s north pole facing towards the top of the image in the usual orientation. The large Otohime boulder can be seen near the bottom. In Figure 2, Ryugu is shown in the orientation used when the Earth is pictured in the Solar System, with the direction of the Earth’s north pole facing up. In this case, Ryugu’s south pole faces the top of the image as Ryugu rotates in the opposite direction to the Earth (retrograde rotation).
igure 1 shows Ryugu’s north pole facing towards the top of the image in the usual orientation. The large Otohime boulder can be seen near the bottom. In Figure 2, Ryugu is shown in the orientation used when the Earth is pictured in the Solar System, with the direction of the Earth’s north pole facing up. In this case, Ryugu’s south pole faces the top of the image as Ryugu rotates in the opposite direction to the Earth (retrograde rotation).
[Open in another window]
Figure 1: Animation of Ryugu with the north pole facing up. The animation was created using data from the ONC-T observations collected on July 10, 2018 between 06:05 and 13:55 UTC. (Image credit※: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST.)
[Open in another window]
Figure 2: Ryugu with the south pole facing up. Ryugu is rotating backwards. Animation created using data from ONC-T observations on July 10, 2018 between 06:05 and 13:55 UTC. (Image credit※: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST.)- Quelle: JAXA
+++
"Hayabusa2" Succeeds with its Second Touchdown!
On July 11, 2019, the Asteroid Explorer "Hayabusa2" succeeded in touching down for the second time on the asteroid Ryugu. During its first touchdown in February of this year, the explorer took samples of substances from the surface of the asteroid. Four months later, "Hayabusa2" blasted a pure copper mass to create an artificial crater on the asteroid, which was followed by this second touchdown mission. Unlike the first touchdown, this mission has a high likelihood of having been able to acquire samples of substances that came from underneath the asteroid's surface.
Yuya Mimasu, who was the person responsible for controlling the positioning of "Hayabusa2," reflected back on the difficulties that they had, especially because it was their second touchdown.
"The sensor at the bottom of the explorer became dirty during the first touchdown from the dust and sand that had risen up. Because of this, we needed to change the settings on the camera that captures our target marker (for the touchdown point)."
They searched for the best settings, and held repeated discussions with various persons involved.
"We proposed a certain setting after having conducted repeated simulations, but we were informed that this setting paid too much attention to ensuring safety, thereby increasing the probability of causing an abort (with the explorer aborting the descent by its autonomous decision). And so, we changed it to a timing that was at the razor's edge of what we could allow. This gave me a renewed awareness of the fact that, when faced with a challenging mission, the key to success is in finding the right balance between safety and the achievability of the mission."

Mimasu says that at the moment of success, "I was thrilled, and at the same time, there was a feeling of relief from having done what we set out to do, and a sense of not being able to believe that we actually succeeded, and other various emotions all jumbled together."
"We shook hands with the members and shared the joy. What made a particularly strong impression upon me was when I shook hands with my superior, with whom I had worked closely together from the time of development, and said to each other, 'we really achieved everything that we set out to do.' I felt proud to be a member of this team, that built up a succession of achievements in various missions over the past year since the explorer arrived at Ryugu."

Mimasu says, "At the beginning, we were not perfect, both as a team and as individuals."
"We worked together by filling in where the other was lacking, which in a way is a fundamental way of doing things, and everyone worked with a high mindset. And I believe this is what enabled us to get to where we are now. 'You must create a good team in order to be able to achieve major results.' This is the lesson that I myself learned through this experience."
The point of the second touchdown was named Uchide-no-kozuchi, after a Japanese folktale of a magical hammer of the same name that produces treasures when it is used, with the hope that the samples acquired from this spot would lead to many discoveries. "Hayabusa2" is scheduled to return to Earth at the end of 2020. The samples brought back by this explorer may be able to provide us with hints toward unravelling the mysteries of the universe.