
.
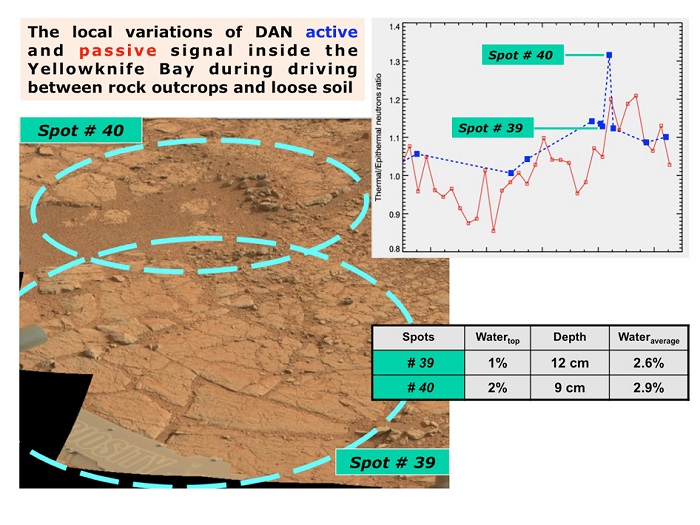
Variation in Subsurface Water In 'Yellowknife Bay'
The image, at lower left, is annotated to show where the Dynamic Albedo of Neutrons (DAN) instrument on NASA's Mars rover Curiosity took measurement on a rock outcrop (Spot 39) and on loose soil (Spot 40) within the "Yellowknife Bay' area of Mars' Gale Crater.
The graph, at upper right, and the table, at lower right, show that the DAN measurements indicated more water in the subsurface at the loose-soil spot than at the rock outcrop. DAN detects even very small amounts of water in the ground beneath the rover, primarily water bound into the crystal structure of hydrated minerals.
The image at lower left was taken by the rover's Mast Camera (Mastcam).
.
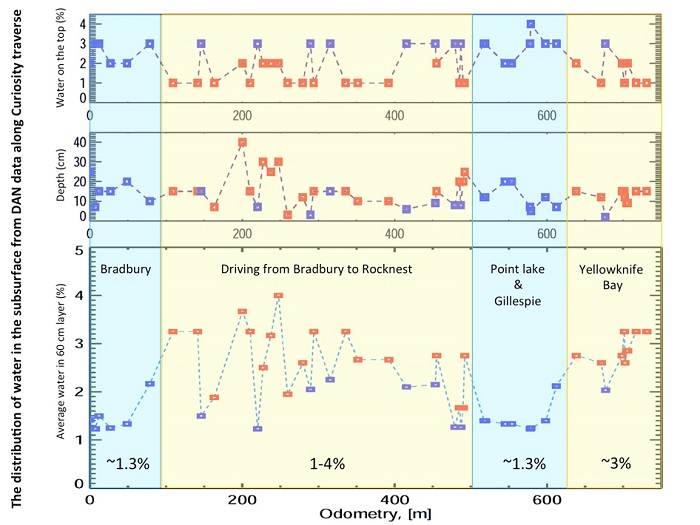
Variation in Water Content in Martian Subsurface Along Curiosity's Traverse
This set of graphs shows variation in the amount and the depth of water detected beneath NASA's Mars rover Curiosity by use of the rover's Dynamic Albedo of Neutrons (DAN) instrument at different points along the distance the rover has driven, in meters.
DAN detects even very small amounts of water in the ground beneath the rover, primarily water bound into the crystal structure of hydrated minerals. The bottom graph indicates that the water content of the top 2 feet (60 centimeters) of the ground at points in the "Yellowknife Bay" area where DAN has taken measurements is estimated at about 3 percent.
.

Bluish Color in Broken Rock in 'Yellowknife Bay'
The Mast Camera (Mastcam) on NASA's Mars rover Curiosity showed researchers interesting internal color in this rock called "Sutton_Inlier," which was broken by the rover driving over it. The Mastcam took this image during the 174th Martian day, or sol, of the rover's work on Mars (Jan. 31, 2013). The rock is about 5 inches (12 centimeters) wide at the end closest to the camera. This view is calibrated to estimated "natural" color, or approximately what the colors would look like if we were to view the scene ourselves on Mars. The inside of the rock, which is in the "Yellowknife Bay" area of Gale Crater, is much less red than typical Martian dust and rock surfaces, with a color verging on grayish to bluish.
.
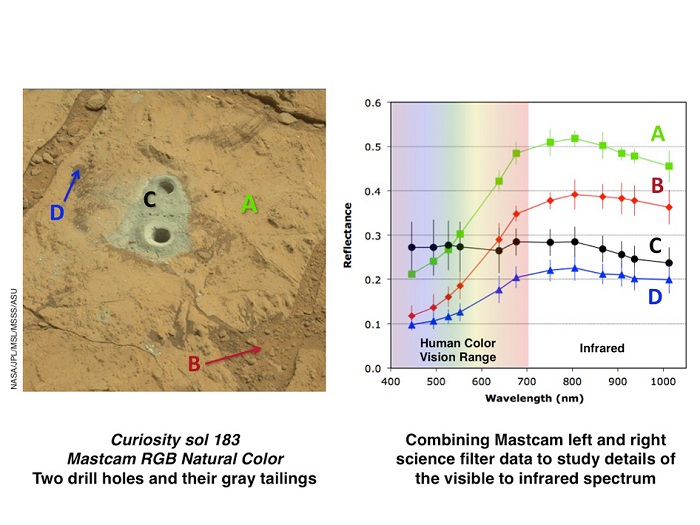
Drill Hole Image and Spectra Acquired by Mastcam
This set of images illustrates how the science filters of the Mast Camera (Mastcam) on NASA's Mars rover Curiosity can be used to investigate aspects of the composition and mineralogy of materials on Mars. On the left is an estimated "natural" color view of Curiosity's full drill hole and mini-drill hole within the "John Klein" outcrop in "Yellowknife Bay" on Sol 183 (Feb. 9, 2013). Natural color simulates approximately what the colors would look like if we were to view the scene ourselves on Mars. On the right is the result of plotting the calibrated level of reflectance (the percentage of incident sunlight that is reflected off the surface) of each of the indicated areas of the image as a function of wavelength (color).
The wavelengths correspond to the Mastcam science filters plus the red, green and blue wavelengths of the Mastcam Bayer filters (for a total of 12 unique wavelengths between the two Mastcam cameras). The six filters at the lower wavelengths are within the range of typical human color vision, while the six filters at the higher wavelengths represent infrared colors that our eyes are not sensitive to, but which the Mastcams can detect.
.
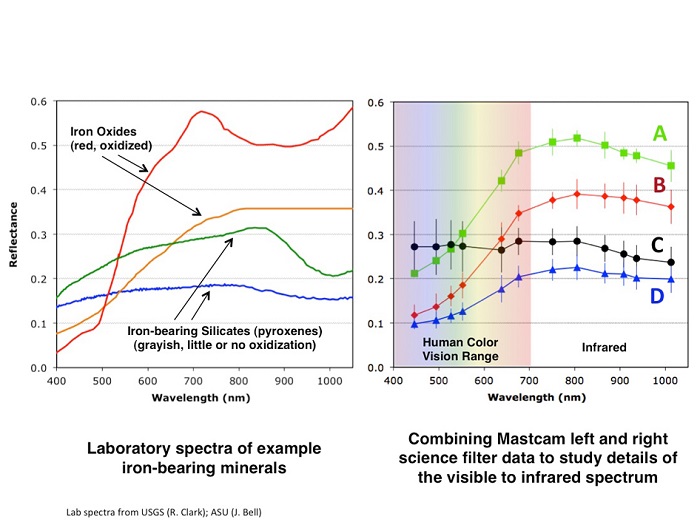
Comparing Mastcam and Laboratory Spectra
This set of images illustrates how the science filters of the Mast Camera (Mastcam) on NASA's Mars rover Curiosity can be used to investigate aspects of the composition and mineralogy of materials on Mars. On the left is a set of laboratory spectra of some iron oxide minerals (red and orange curves) and some relatively unoxidized minerals from typical basaltic volcanic rocks: pyroxenes (green and blue curves). On the right is the result of plotting the calibrated level of reflectance (the percentage of incident sunlight that is reflected off the surface) of several distinct regions from the Sol 183 (Feb. 9, 2013) Mastcam image of drill holes at rock target "John Klein" as a function of wavelength (color).
The wavelengths correspond to the Mastcam science filters plus the red, green and blue wavelengths of the Mastcam Bayer filters, for a total of 12 unique wavelengths between the two Mastcam cameras. The six filters at the lower wavelengths are within the range of typical human color vision, while the six filters at the higher wavelengths represent infrared colors that our eyes are not sensitive to, but which the Mastcams can detect.
.
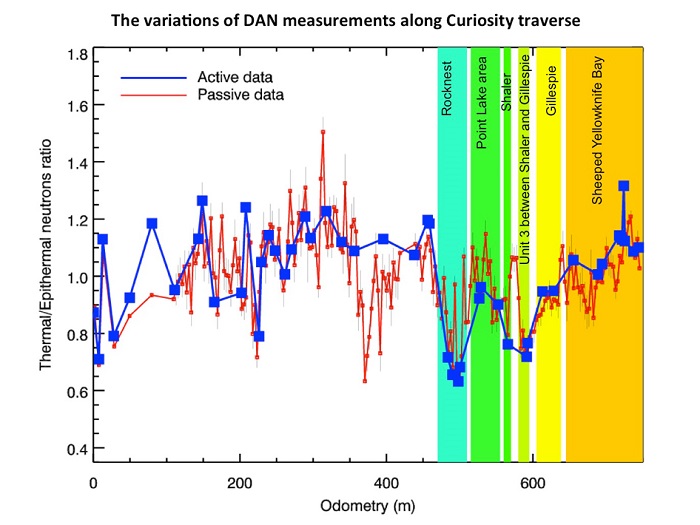
Variations of DAN measurements along Curiosity traverse
This chart graphs measurements made by the Dynamic Albedo of Neutrons (DAN) instrument on NASA's Mars rover Curiosity against the distance the rover has driven, in meters.
In active mode, DAN shoots neutrons into the ground and senses how they are reflected. Neutrons that collide with hydrogen atoms bounce off with a characteristic decrease in energy. By measuring the energies of the reflected neutrons, DAN can detect the fraction that was slowed in these collisions, and therefore the amount of hydrogen. In the passive mode, DAN does not shoot neutrons into the ground, but relies on galactic cosmic rays as a source of neutrons that are reflected by subsurface hydrogen and detected by DAN.
.
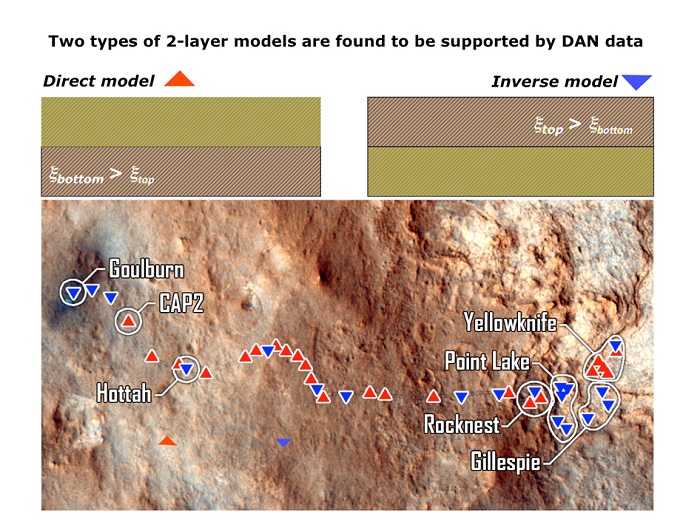
Two Types of Modeling of Subsurface Water
The Dynamic Albedo of Neutrons (DAN) instrument on NASA's Mars rover Curiosity detects even very small amounts of water in the ground beneath the rover, primarily water bound into the crystal structure of hydrated minerals. This graphic presents two types of modeling for how much of the detected water is very close to the surface and how much is deeper within the top 20 inches (half meter). At most places where the rover has made DAN measurements, the best fit for the data is one with less water in the upper layer than in the lower layer.
.
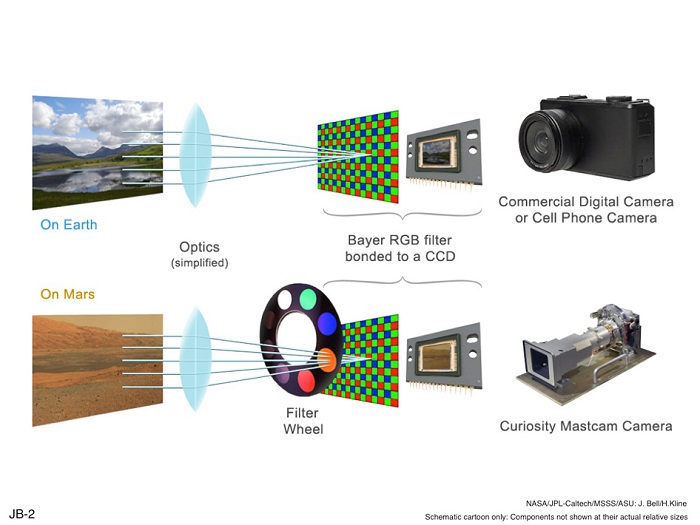
Filters for Color Imaging and for Science
The color cameras on NASA's Mars rover Curiosity, including the pair that make up the rover's Mast Camera (Mastcam) instrument, use the same type of Bayer pattern RGB filter as found in typical commercial color cameras. Bayer filtering means that the charge-coupled device (CCD) that detects each pixel of the image is covered with a grid of green, red and blue filters so that the camera gets the three color components of the entire scene in a single exposure. Electronics inside the camera can then merge the separate sets of color pixels into a single full-color image.
Besides the affixed red-green-blue filter grid, the Mastcam cameras also each have an eight-position filter wheel with specialized science filters between the camera optics and the CCD. The wheel can be rotated to choose one of these narrow-waveband filters, in the visible-light or infrared parts of the spectrum, or no filter at all. Each camera's filter wheel holds six science filters that, between both cameras, can yield images in nine unique wavelengths from the deep blue (445 nanometers) to the short-wave near-infrared (1012 nanometers). One additional science filter in each wheel is specially designed to enable direct imaging of the sun.
.
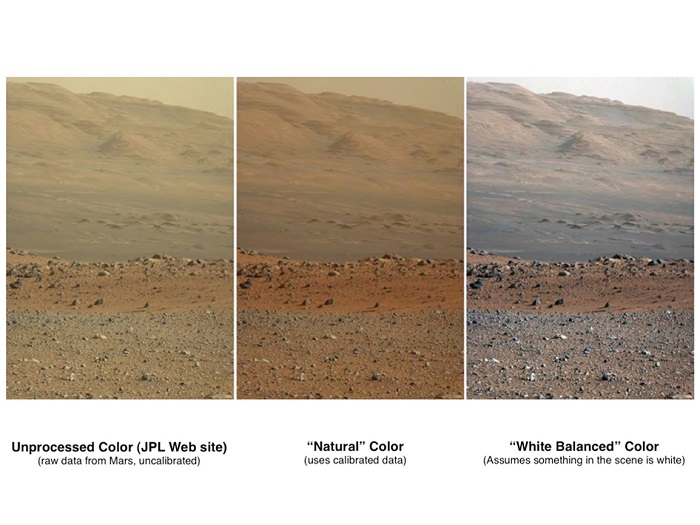
'Raw,' 'Natural' and 'White-Balanced' Views of Martian Terrain
These three versions of the same image taken by the Mast Camera (Mastcam) on NASA's Mars rover Curiosity illustrate different choices that scientists can make in presenting the colors recorded by the camera. The left image is the raw, unprocessed color, as it is received directly from Mars.
The center rendering was produced after calibration of the image to show an estimate of "natural" color, or approximately what the colors would look like if we were to view the scene ourselves on Mars. The right image shows the result of then applying a processing method called white-balancing, which shows an estimate of the colors of the terrain as if illuminated under Earth-like, rather than Martian, lighting.
The image was taken by the Mastcam on Sol 19 of Curiosity's mission on Mars (Aug. 23, 2012), using only the camera's red-green-blue Bayer filters. It looks south-southwest from the rover's landing site toward Mount Sharp.