
27.09.2018

Rover-1B succeeded in shooting a movie on Ryugu’s surface! The movie has 15 frames captured on September 23, 2018 from 10:34 - 11:48 JST. Enjoy ‘standing’ on the surface of this asteroid! [6/6]



Quelle: JAXA
+++
Rover-1A snapped a photograph of its own antenna and pin! Image taken on September 23, 2018 at 09:48 JST. [5/6]

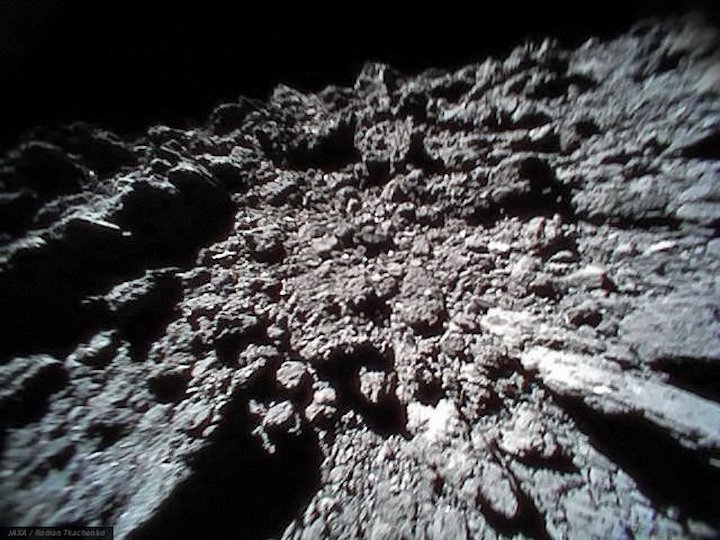
This surface image was taken by Rover-1A on September 23, 2018 at 09:43 JST. [4/6]

This image was captured on September 23, 2018 at 10:10 JST by Rover-1B after landing. [3/6]

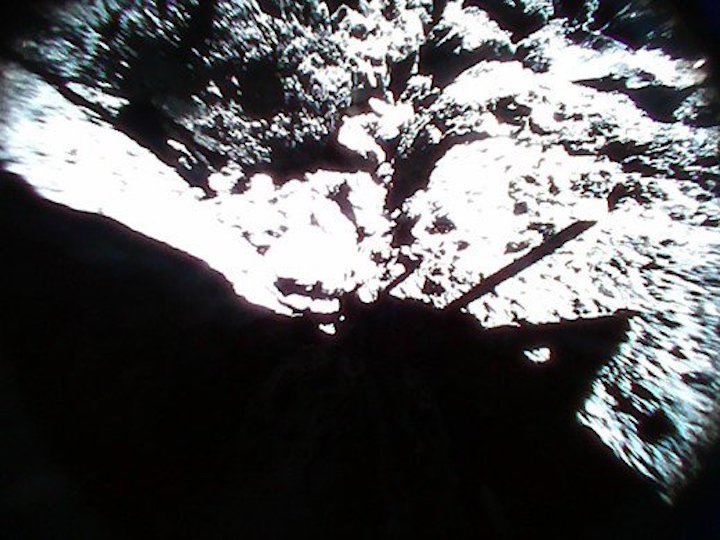
This image was taken just before Rover-1B hopped. Photograph snapped on September 23, 2018 at about 09:46 JST [2/6]
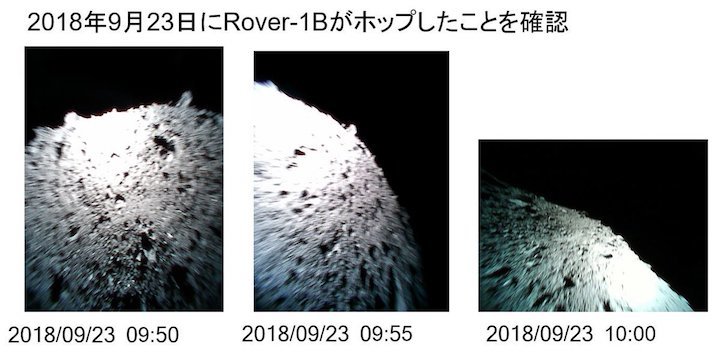
Our MINERVA-II1 rovers have sent back more images from the surface of Ryugu! Let’s take a look at these images in detail. On September 23, 2018, We were able to confirm that Rover-1B hopped! [1/6]
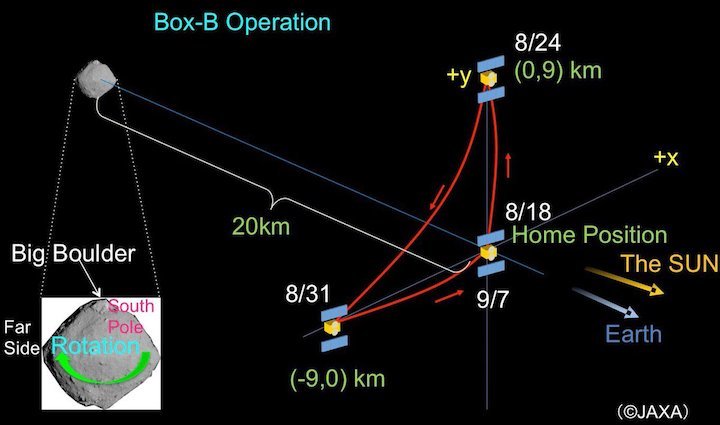
While Hayabusa2 normally hovers at the home position, for the BOX-B “tour” operation, the spacecraft swung round to see Ryugu’s south pole and evening
Quelle: JAXA
+++
はやぶさ2がMINERVA-II1の分離運用で降下した際に、望遠カメラONC-Tでは、これまでのリュウグウ表面の写真で最高解像度になる画像が撮られました。この画像を紹介します。
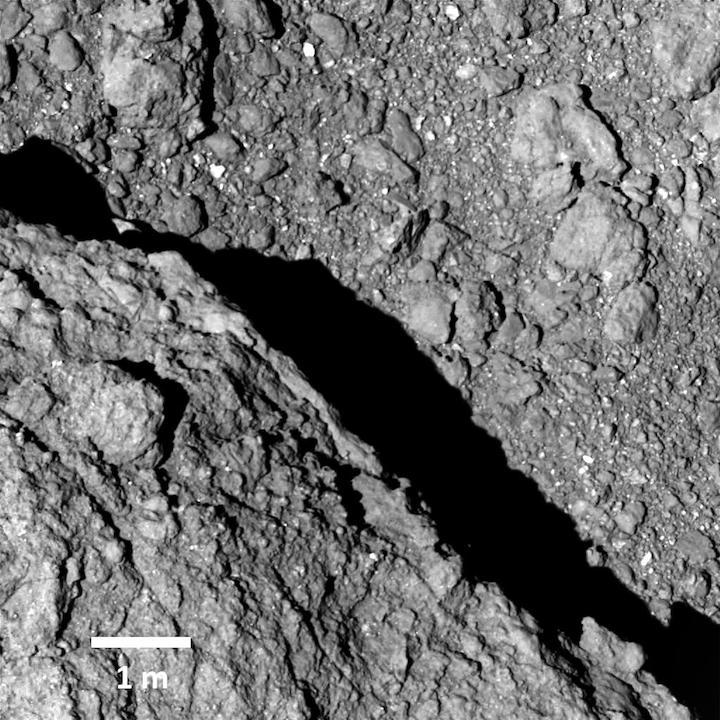
図1 高度約64mで、ONC-Tによって撮影されたリュウグウの画像。2018年9月21日13:04頃(日本時間)に撮影。これまでのリュウグウ表面の写真で最高解像度になる。画面左下は大きな岩塊。(画像クレジット※:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
この画像がリュウグウ上でどこに位置するかは、次の図2をご覧ください。
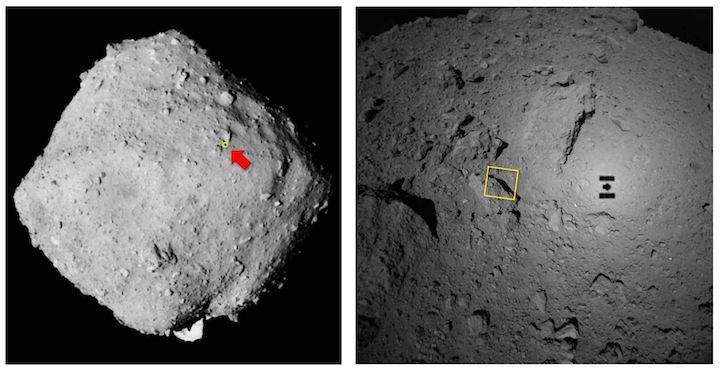
図2 最高解像度画像で撮影された場所。黄色い枠が図1に対応する領域。(左)リュウグウ全体の上での位置を示すONC-T画像。(右)2018年9月21日13:02JST 高度70mにてONC-W1により撮像。 (画像クレジット※:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
参考:「はやぶさ」での最高解像度の画像
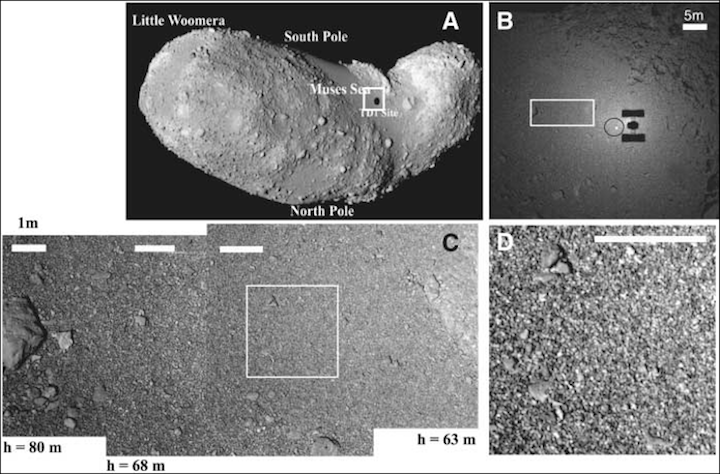
図3 「はやぶさ」が撮影したイトカワ表面の高解像度の画像。Dが高度63mから撮影したもの。通称ミューゼスの海(正式名称MUSES-C Regio)が直径が数mmから数cmの “じゃり” で覆われていることがわかる。
(論文 Yano. et al. SCIENCE VOL 312 2 JUNE 2006 より)
Quelle: JAXA
---
Update: 28.09.2018
.
Photos from Japanese space rovers show asteroid is ... rocky

New photos taken on the surface of an asteroid show that it is (drum roll, please) ... rocky.
It may be no surprise, but Japan space agency scientists and engineers are thrilled by the images being sent to Earth by two jumping robotic rovers that they dropped onto an asteroid about 280 million kilometers (170 million miles) away.
The Japan Aerospace Exploration Agency posted the latest photos on its website late Thursday. They show slightly tilted close-ups of the rocky surface from different locations.
"I cannot find words to express how happy I am that we were able to realize mobile exploration on the surface of an asteroid," project manager Yuichi Tsuda said on the space agency's website.
It took more than three years for the unmanned Hayabusa2 spacecraft to reach the vicinity of asteroid Ryugu. One week ago, the craft successfully dropped a small capsule with two rovers onto its surface. The rovers, each about the size of circular cookie tin, don't have wheels but jump around the asteroid.
Hayabusa2 is scheduled to drop a German-French lander with four observation devices onto the asteroid next week. It later will attempt to land on the asteroid itself to collect samples to send back to researchers on Earth.
Quelle: abcNews
+++
Hayabusa 2 rovers send new images from Ryugu surface

Japan's space agency (Jaxa) has released new images from the robot rovers it has deployed to the surface of an asteroid.
The photos reveal new details of the surface of the space rock, which is known as Ryugu.
On 21 September, the rovers were released on to the surface by the "mothership", Hayabusa 2.
Hayabusa 2 reached Ryugu in June after a three-and-a-half-year journey.
The pictures show in clear relief the rugged, boulder-strewn landscape of this striking Solar System body.
The robots, known as Rover 1A and Rover 1B, are now both confirmed to be working on the surface of the space rock.
The 1kg autonomous rovers move about by hopping, using the asteroid's low gravity. Each one contains a motor-powered internal mass that rotates to generate force, propelling the robot across the surface.
Japan's rovers send pictures from asteroid
On Friday, Hayabusa 2 descended to about 60m in order to release the rovers, which had been stored in a container on the base of the spacecraft.
One of the principal concerns for deployment was Ryugu's rougher-than-expected surface, which is carpeted with boulders and has very few smooth patches.
The 1kg rovers are equipped with wide-angle and stereo cameras to send back pictures. Spine-like projections from the edges of the hoppers are sensors that will measure surface temperatures on the asteroid.
The 900m-wide space rock known formally as 162173 Ryugu belongs to a particularly primitive type of asteroid.
It is thought to be a relic left over from the early days of our Solar System, so studying it could shed light on the origin and evolution of our own planet.
Quelle: BBC
---
Update: 2.10.2018
.
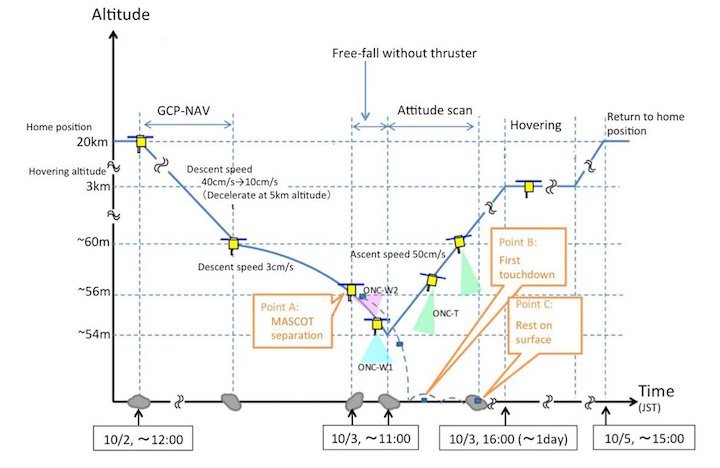
[MASCOT] October 2 at 12:14 JST: The spacecraft was confirmed to have started the descent from the home position (altitude of about 20km) as planned.
+++
[MASCOT] During the MASCOT deployment operation, images taken for navigation with the Optical Navigation Camera - Wide angle (ONC-W1) will be replayed in real time. Come and see our gallery!
GalleriesNavigation Images from the MASCOT
deployment operation
(Real time delivery
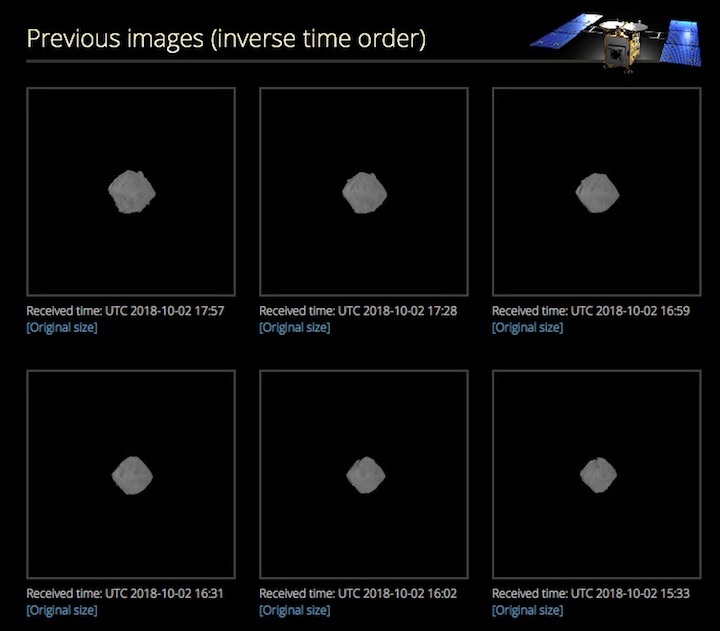
Navigation Images from the MASCOT deployment operation (Sep. 30 - Oct. 4, 2018), taken by the wide-angle camera ONC-W1.
We are currently delivering navigation images with the Optical Navigation Camera Wide angle (ONC-W1) in real time. Please understand that the image may be distorted due to the network status or data processing.
- The page displays the latest list of images at the time of loading. Please reload the browser window to update to the latest image.
- Time is given in UTC (Universal Time). For Japan time (JST), please add 9 hours. For Eastern Time (ET), please subtract four hours.
- In these figures the south pole of the asteroid is at the image top.
Received time: UTC 2018-10-02 18:26
+++
[MASCOT] October 2 at 14:40 JST: The spacecraft is descending towards Ryugu. The altitude is now about 16km.
+++
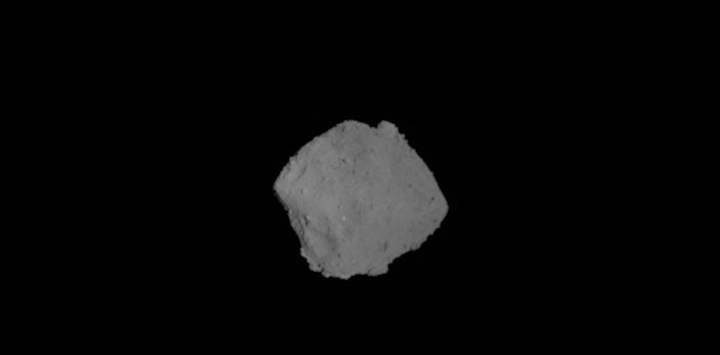
[MASCOT] October 2 at 17:10 JST: the altitude of Hayabusa2 is about 12 km. This photo was captured by the ONC-W1 at about 04:30 JST. Currently, Ryuyu still looks small!
+++
MASCOT] The schedule for the deployment of the @MASCOT2018 lander is now online.
+++
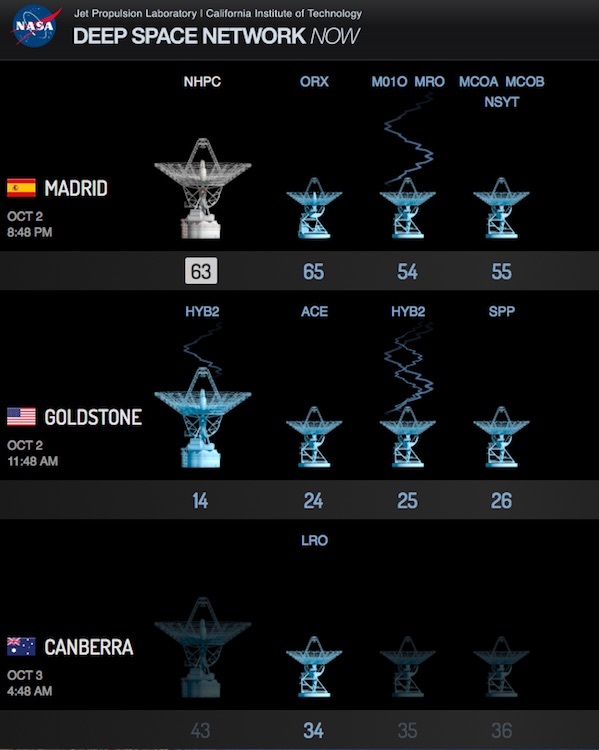
[MASCOT] October 2 at 18:40 JST: The altitude of Hayabusa2 has passed 10km. Communications are now via the Madrid DSN station. There are more than 20 members in the Hayabusa2 control & operation rooms on the JAXA Sagamihara campus, monitoring the situation of the spacecraft.
+++
[MASCOT] October 2 at 20:00 JST the altitude of the spacecraft has passed 8km.
+++
[MASCOT] Currently, we communicating via an antenna of the Madrid DSN. Two antennas are currently in use for us as this is an important operation so we have secured a backup antenna. This can be seen on this website where HYB2 is Hayabusa2!
[MASCOT] October 2 at 21:30 JST: The altitude of the spacecraft has passed 6km. This photo was captured by the ONC-W1 at about 21:00 JST. Ryugu is gradually getting bigger!
+++
[MASCOT] October 2 at 22:45 JST: Hayabusa2 has slowed its descent and is now approaching Ryugu at about 0.1 m/s. Altitude is about 4500 m and we are approaching more slowly than ever before.
+++
[MASCOT] October 3 at 03:05 JST: Hayabusa2 has descended to an altitude of about 2900m: we’ve passed 3km to the asteroid surface!
+++
It's sad that majority of the world's population will not realise just how incredible this is.
+++
Topics
The small asteroid lander, MASCOT
MASCOT (Mobile Asteroid Surface Scout) is the asteroid lander jointly developed by DLR (German Aerospace Center) and CNES (French National Center for Space Studies). MASCOT is stored on the -Y-plane side of Hayabusa2 (this is the left-hand side surface when the high gain antenna is at the head and the ion engine is at the spacecraft back) and deployed from this position (see Figure 1).
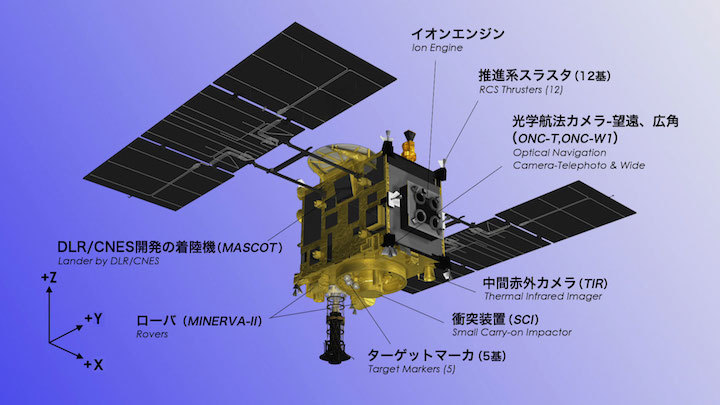
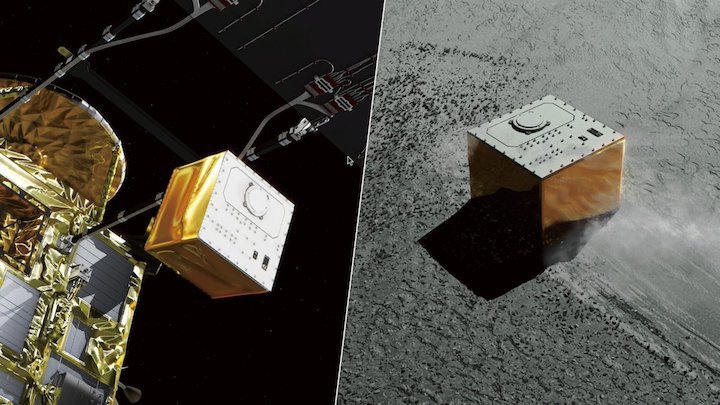
Figure 1: Illustration of the Hayabusa2 spacecraft. MASCOT is stored on the -Y-plane (left side) panel.(Image credit:JAXA)
MASCOT has the shape of a cuboid with dimensions 0.3 x 0.3 x 0.2m. The lander weighs about 10kg, and is a bit larger and heavier than the MINERVA-II1 rovers (diameter: 18cm, height: 7cm, weight: 1.1kg). (Figure 2).

On the top side of MASCOT is an antenna to communicate with the repeater (OME-E) of Hayabusa2, as with MINERVA-II1. A wide-angle camera (MASCAM) is mounted on the side to capture images of the lander’s surrounding. An infrared spectroscopic microscope (MircOmega) sits on the bottom surface of MASCOT to investigate the composition and characteristics of the minerals on the surface of Ryugu. There is also a thermal radiometer (MARA) to measure the surface temperature and a magnetometer (MasMag) to measure any magnetic field.
MASCOT also has a hopping mechanism similar to that of MINERVA-II1. Using a motor to rotate a swing-arm within the lander, MASCOT can change its attitude or jump. Since MASCOT is designed to operate in the position where the top antenna is directed upwards and the spectroscopic microscope faces downwards, this hopping mechanism can correct the attitude if the lander is in a different orientation once on the surface of Ryugu. MASCOT can also use the hop to move locations once; the lander does not hop multiple times like the MINERVA-II1 rovers.
For the landing site for MASCOT, a region in the southern hemisphere of Ryugu was selected (Figure 4). This location was selected based on criteria that ensured no overlap between the landing sites for the touchdown of Hayabusa2, MINERVA-II1 and MASCOT, the time to be able to communicate with Hayabusa2, the duration of sunlight exposure and expectation of scientifically meaningful exploration.
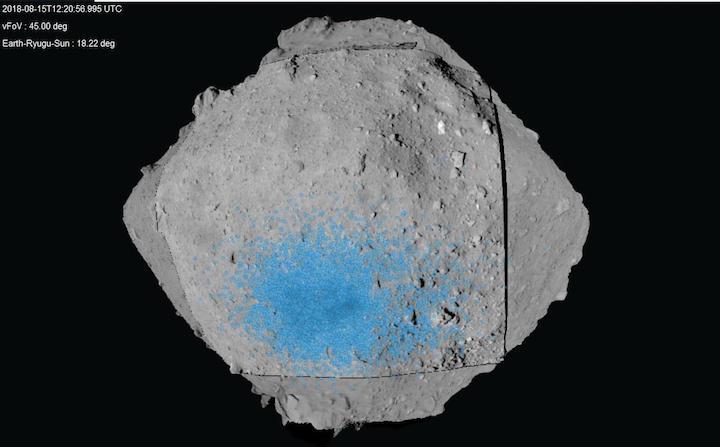
Figure 4: MASCOT landing site candidate region (light blue area). Since MASCOT is expected to bounce several times after first touching down, a reasonably wide region is selected.
(Image credit: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST, CNES, DLR).
MASCOT does not use solar cells but is equipped with a lithium primary battery built into the lander. The duration of the battery is about 16 hours (about two rotations of Ryugu), allowing MASCOT to operate continuously for two Ryugu days after a successful separation. Operation of the lander will end when the battery runs out.
Quelle: JAXA
---
Update: 11.10.2018
.
Hayabusa 2 probe landing on Ryugu asteroid pushed back to Jan. 2019
TOKYO -- The Japan Aerospace Exploration Agency (JAXA) will postpone space probe Hayabusa 2's landing on the asteroid Ryugu until January 2019, the Mainichi Shimbun has learned.
JAXA will be holding a press conference shortly.
+++
Japan delays touchdown of Hayabusa2 probe on asteroid: Official

TOKYO: A Japanese probe sent to examine an asteroid in order to shed light on the origins of the solar system will now land on the rock several months later than planned, officials said Thursday (Oct 11).
The Japan Aerospace Exploration Agency (JAXA) told reporters the Hayabusa2 probe is now expected to touch down on the Ryugu asteroid in "late January" at the earliest, rather than at the end of this month as initially expected.
JAXA project manager Yuichi Tsuda said they needed more time to prepare the landing as the latest data showed the asteroid surface was more rugged than expected.
"The mission ... is to land without hitting rocks," Tsuda said, adding this was a "most difficult" operation.
"We had expected the surface would be smooth ... but it seems there's no flat area."
Scientists are already receiving data from other machines deployed on the surface of the asteroid.
Last week, JAXA successfully landed a new 10kg observation robot known as MASCOT - "Mobile Asteroid Surface Scout."
Loaded with sensors, the robot can take images at multiple wavelengths, investigate minerals with a microscope, gauge surface temperatures and measure magnetic fields.
Ten days earlier, a pair of MINERVA-II micro-rovers were dropped onto the asteroid - marking the first time that moving, robotic observation devices have been successfully deployed.
These rovers are taking advantage of Ryugu's low gravity to jump around on the surface - travelling as far as 15m and staying above the surface for as long as 15 minutes - to survey the asteroid's physical features with cameras and sensors.
Hayabusa2, about the size of a large fridge and equipped with solar panels, is the successor to JAXA's first asteroid explorer, Hayabusa, which is Japanese for falcon.
That probe returned from a smaller, potato-shaped, asteroid with dust samples in 2010, despite various setbacks, during an epic seven-year odyssey hailed as a scientific triumph.
The Hayabusa2 mission, which costs around 30 billion yen (US$260 million), was launched in December 2014 and will return to Earth with its samples in 2020.
Photos of Ryugu - which means "Dragon Palace" in Japanese, a castle at the bottom of the ocean in an ancient Japanese tale - show an asteroid shaped a bit like a spinning top with a rough surface.
By collecting samples from the surface, scientists hope to answer some fundamental questions about life and the universe, including whether elements from space helped give rise to life on Earth.
Quelle: channelnewsasia.com
---
Update: 16.10.2018
.
MASCOT completes first scientific 'stroll' across asteroid Ryugu
The German lander MASCOT has completed its first scientific "stroll" across the asteroid Ryugu.
After being released last week by Hayabusa-2, the Japanese space agency probe circling Ryugu, MASCOT conducted a 17-hour scientific exploration, using its instruments to conduct experiments at several locations on the asteroid's surface.
Hayabusa-2's camera helped scientists track the path of MASCOT's stroll.
"This success was possible thanks to state-of-the-art robotic technology, long-term planning and intensive international cooperation between the scientists and engineers of the three space nations Japan, France and Germany," Hansjörg Dittus, scientist at the German Aerospace Center, said in a news release.
The Mobile Asteroid Surface Scout was designed by engineers in France and Germany. The design team outfitted the lander with a small infrared spectroscopic microscope. During its stroll, MASCOT used the instrument to analyze the composition of Ryugu's surface.
MASCOT also used its thermal radiometer to measure electromagnetic radiation and its magnetometer to detect magnetic fields.
"We are proud of how MASCOT was able to master its way across the asteroid Ryugu over boulders and rocks and send so much data about its composition back to Earth," said mission scientist Pascale Ehrenfreund.
After its release and free fall, MASCOT bounced eight times along the asteroid's surface. The lander ended up in the wrong position, but used a spring-like mechanism to reorient itself.
Images recorded by Hayabusa-2's camera suggest the asteroid's surface is even more rugged than initially thought. Scientists are currently analyzing the data collected by MASCOT's instrument to get a better senses of the asteroid's surface features and composition.
"Everything is covered in rough blocks and strewn with boulders. How compact these blocks are and what they are composed of, we still do not know," said Ralf Jaumann, scientist at the DLR Institute of Planetary Research. "But what was most surprising was that large accumulations of fine material are nowhere to be found -- and we did not expect that. We have to investigate this in the next few weeks, because the cosmic weathering would actually have had to produce fine material."
Quelle: SD
+++
Schedule change for the touchdown
operation
On the basis of the recent observations and operations in the vicinity of asteroid Ryugu by the Hayabusa2 spacecraft, the project team have decided to postpone the touchdown (TD) from the end of October this year (2018) to after January next year.
The upcoming main mission operations in 2018 will be:
・October, 14 - 15: TD1-R1-A(equivalent to the second TD rehearsal)
・October, 24 - 25: TD1-R3(equivalent to the third TD rehearsal)
・Late November to December: operation for solar conjunction
The exact timing of the first touchdown will be considered during the operation period of solar conjunction, based on the results found during the rehearsal operations up to TD1-R3.
This decision to postpone touchdown is based on two main reasons. The first involves the improved understanding of the surface conditions on Ryugu by the operations conducted so far, and the second is the increased knowledge of the precision of the navigation guidance of the spacecraft.
As we discovered upon arrival at the asteroid, the surface of Ryugu is covered with numerous boulders with no wide, flat areas. The landing candidate sites of L08, L07 and M04 were therefore selected as locations offering a relatively safe region for touchdown on this difficult surface. Further examination of these candidate sites revealed that based on the data so far, a section of L08 seemed to be the best spot. The project team named this area L08-B (Figure 1).
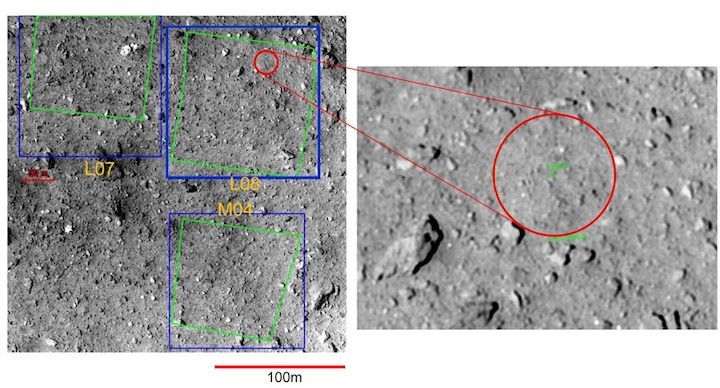
- Figure 1: Touchdown candidate sites L08, L07 and M04 (left). The red circle is the region named L08-B. This image was captured by the ONC-T (Optical Navigation Camera – Telescopic) from an altitude of about 3km on September 12, 2018 during the Touchdown 1 Rehearsal 1 (TD1-R1) operation.
(Image credit ※: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST).
In the area where the spacecraft will touchdown, it is dangerous to have boulders with a height greater than about 50cm. Since the length of the sampler horn is about 1m and the spacecraft will be to be slightly inclined during the touchdown, there is a possibility that if a boulder with a height above about 50cm is present, it will strike the main body of the spacecraft or the solar panels. Viewed from the position in Figure 2, there is no boulder larger than 50cm in the area L08-B. L08-B is the widest part within all the candidate sites without a boulder larger than 50cm.

- Figure 2: L08-B (area enclosed within the red circle) and its peripheral area imaged from a lower altitude. The photograph was captured with the ONC-T (Optical Navigation Camera – Telescopic) from an altitude of about 1.9km during the MASCOT separation operation on October 3, 2018 at 05:41 JST.
(Image credit ※: JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu, AIST).
The difficulty is that area L08-B is only about 20m in diameter. Originally, it was assumed that a safe region for touchdown would be a flat area with a radius of about 50m (100m in diameter). This has now become a radius of just 10m; a fairly severe constraint. On the other hand, during the descent to an altitude of about 50m during the MINERVA-II1 and MASCOT separation operations, we were able to confirm that the spacecraft can be guided within a position accuracy of about 10m for a height 50m above the surface of Ryugu (Figure 3). This is a promising feature for touchdown.
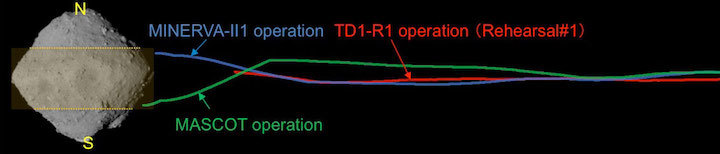
- Figure 3: Trajectory during the descent operations. TD1-R1 descended over the equator, the MINERVA-II1 operation approached the mid-latitudes in the northern hemisphere and the MASCOT operation was down towards the mid-latitudes in the southern hemisphere. It was confirmed that over the whole range of Hayabusa2 between latitudes ±30°, a location precision of about 10m at an altitude of 50m is possible. (Image credit: JAXA)
Although the spacecraft can be controlled with a position error of 10m at an altitude down to 50m, there remains the question of whether this accuracy can be retained as the spacecraft descends to the surface. This must be confirmed before touchdown operations. Therefore, the touchdown itself will be postponed until next year, during which time we will have two touchdown rehearsals; TD1-R1-A and TD1-R3.
The rehearsals are designed to check the accuracy of navigation guidance at altitudes less than 50m. For this check, the characteristics of the LRF (Laser Range Finger: used to measure the altitude in near distance) need to be tested. Originally, this was planned for the first touchdown rehearsal (TD1-R1: September 10 – 12, 2018). However, during this operation the LIDAR (laser altimeter) had an issue that the mode did not changed from the far mode to the near mode and the operation of the LRF could not be confirmed. The LIDAR was confirmed to have no issue in subsequent operations, leaving only the LRF to be tested. This will be performed with TD1-R1-A.
In TD1-R3, the item check list will depend on the results of TD1-R1-A. If TD1-R1-A has successfully confirmed the characteristics of the LRF, then the measurement results from the LRF will be used during control of the TD1-R3 operation and if possible, a target marker (TM) will be separated and the spacecraft confirmed to be able to properly track the target marker.
The results of these operations will be investigated in detail to plan the first touchdown. Furthermore, data from the surface of Ryugu taken by the MINERVA-II1 rovers and MASCOT lander will also provide important information for the touchdown. Although the first touchdown schedule is changed, we have enough time margins in our schedule, and our aim is a more reliable and safe operation through a comprehensive study of all the sources of information obtained so far during the Hayabusa2 project.
Quelle: JAXA
+++
TD1-R1-A operation schedule
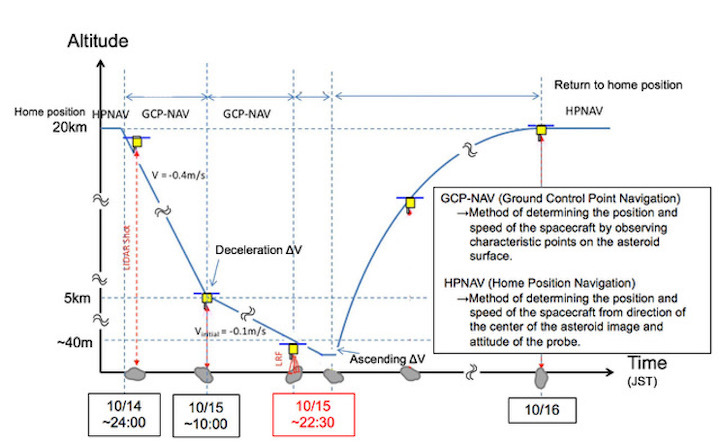
The second touchdown rehearsal will be performed from October 14 – 16. The purpose of this rehearsal is to confirm the operation characteristics of the LRF (Laser Range Finder) which performs the altitude measurement at short distances. To test this, the spacecraft will descend to an altitude of about 25m. This will be the lowest altitude reached to date.
The first touchdown rehearsal (TD1-R1) was conducted between September 10 – 12. During this operation, problems occurred with the distance measurement taken with the LIDAR (laser altimeter) once the spacecraft had descended to about 600m. This caused the spacecraft to rise autonomously. The issue was addressed by adjusting the settings on the laser altimeter and it was confirmed that there were no further issues during the subsequent separation operations of MINERVA-II1 and MASCOT. As the spacecraft was only able to descend to an altitude of 600m during TD-R1, the LRF characteristics could not be verified. Therefore, we are performing this check with this rehearsal.
Although this is the second time a rehearsal operation has been performed, the name is TD1-R1-A as it is re-starting the challenge of TD1-R1.
Main schedule for the TD1-R1-A operation
Notes:
- Time: Approximate schedule time (in 10 minute increments). There is a possibility that this may change during operation. The time is the onboard time, so confirmation of the event is the radiowave propagation time of about 18 minutes later.
- Spacecraft speed: This is the speed relative to the asteroid (minus is towards the asteroid, positive is away). Numerical value is displayed only when speed control is performed. After a speed control operation, the speed changes due to the gravitational force of Ryugu and other celestial bodies.
- HP altitude: Distance to the center of Ryugu.
- Near point altitude: Distance to the surface of Ryugu.
Quelle: JAXA
+++
Navigation Images from the TD1-R1-A
operation
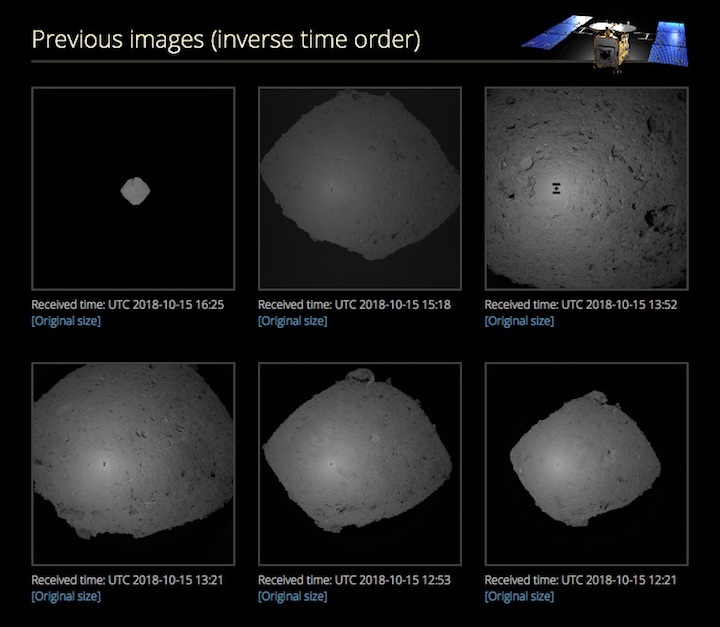
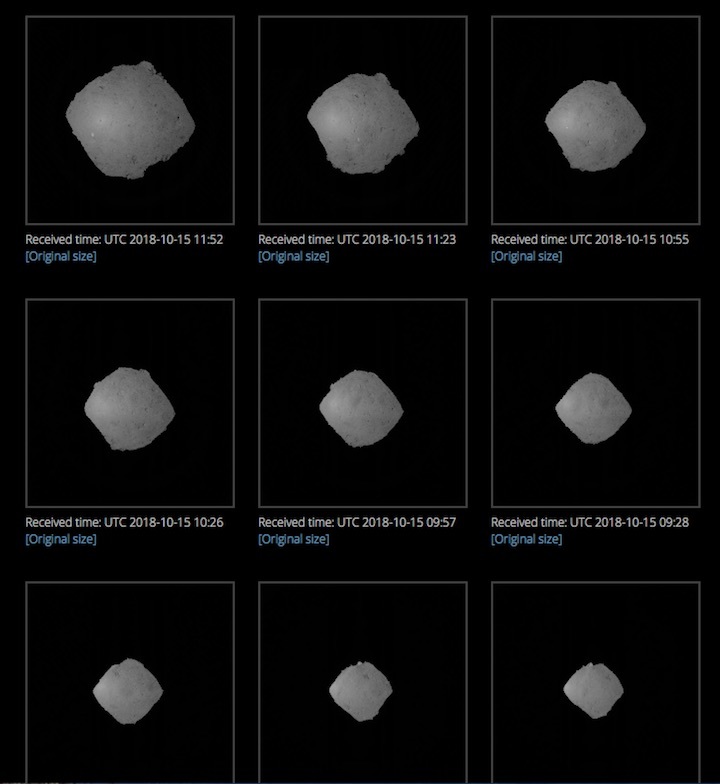
Quelle: JAXA